|
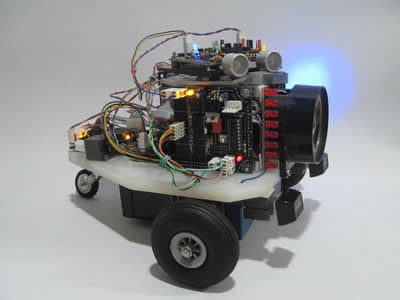
Robot autônomo de tração 2x, com sensores antichoque, sonar móvel
com motor de passo para ângulo de visão de 180°, sintetizador de sequência
de som e voz, entrada para link wireless, ponte H de potência e placa controladora central P452 com clock de 40MHz.
Ao ser ligado o robot UX60 executa um auto teste, com movimentos para as laterais
com a finalidade de reconhecimento de obstáculos, aciona seu módulo
de som, estaciona e fica aguardando um comando via link wireless ou botão start, para iniciar seu percurso.
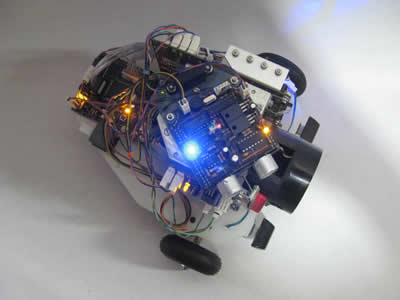
No seu trajeto, ao encontrar um obstáculo detectado pelo sonar,
movimenta o módulo sonar para a direita e para a esquerda, buscando
um caminho livre. Caso bata em um obstáculo fora do alcance do sonar
e na altura do sensor antichoque, o UX60 para, dá marcha ré,
aciona seu módulo de voz informando o lado atingido,
procura um caminho livre e retoma sua trajetória.
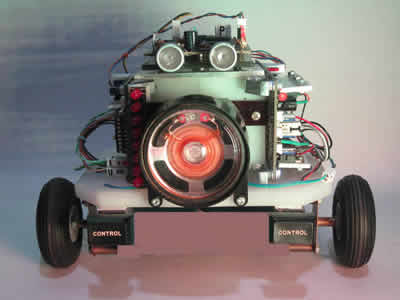
Módulos Disponíveis:
Main - UX:
Placa principal onde é gravado o software residente que comanda todos os outros módulos.
PonteH - UX:
Placa com transistores de potência, na configuração "Ponte H", para comando dos motores dianteiros.
Sonar - UX:
Controladora com emissor e sensor de ultraSom e conversor de protocolo.
Vox - UX:
Placa sintetizadora de sequência de som e voz.
Path - UX:
Placa com barramento 12VDC para alimentação dos outros módulos, conexão com a bateria e barramento de comunicação.
MPasso - UX:
Controladora de motor de passo com sensores de posição e conversão de protocolo.
GPasso - UX:
Base com motor de passo, engrenagens e suporte para fixação da placa sonar.
Chicotes - UX:
Cada placa necessita de 02 chicotes com terminais KK, sendo um para alimentação e outro para comunicação.
Alimentação:
Bateria chumbo-ácida 12V 1700 mAH ou Li-PO 11,1V 1600mAH 25C (requer carregador especial).
|